Les matrices tridiagonales sont des matrices dont les seuls coefficients non nuls se trouvent sur la diagonale principale et sur les deux diagonales adjacentes. Elles apparaissent régulièrement dans les sujets de concours, notamment à HEC, à l’ESCP et à EML, car elles se prêtent naturellement aux raisonnements par récurrence, à la diagonalisation et aux suites récurrentes linéaires d’ordre 2. Cet article définit les matrices tridiagonales, étudie la forme quadratique associée pour encadrer les valeurs propres, puis traite en détail la diagonalisation dans le cas classique à coefficients constants.
Définition
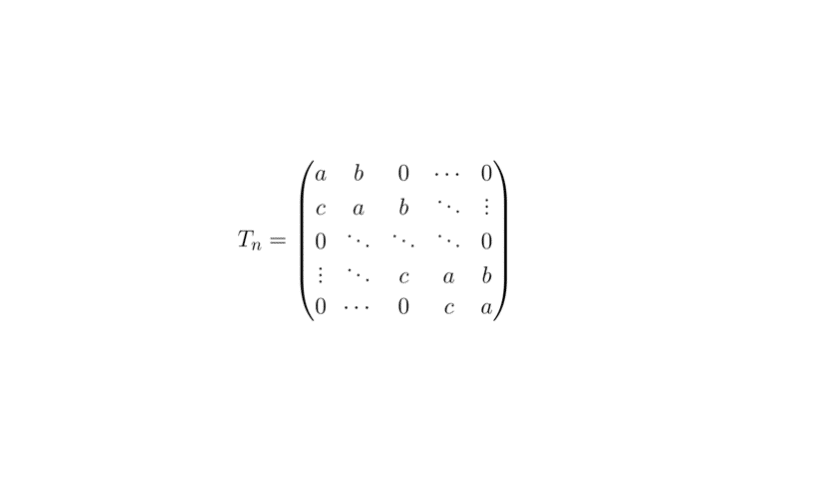
Une matrice \( A \in M_n(\mathbb{R}) \) est dite tridiagonale si ses coefficients \( a_{i,j} \) sont nuls dès que \( |i – j| \geq 2 \). Autrement dit, seuls les coefficients situés sur la diagonale principale, la surdiagonale et la sous-diagonale peuvent être non nuls.
Pour \( n = 4 \), une matrice tridiagonale a la forme :
\[ A = \begin{pmatrix} a_1 & b_1 & 0 & 0 \\ c_1 & a_2 & b_2 & 0 \\ 0 & c_2 & a_3 & b_3 \\ 0 & 0 & c_3 & a_4 \end{pmatrix}. \]
La matrice est entièrement déterminée par trois suites de coefficients : les \( a_i \) sur la diagonale, les \( b_i \) sur la surdiagonale et les \( c_i \) sur la sous-diagonale. Tous les autres coefficients sont nuls. Cette structure creuse est ce qui rend ces matrices si agréables à manipuler.
Cas fondamental : la matrice \( A_n \)
Le cas le plus fréquent aux concours est la matrice tridiagonale symétrique dont la diagonale est nulle et les deux diagonales adjacentes valent 1.
Pour \( n = 4 \) :
\[ A_4 = \begin{pmatrix} 0 & 1 & 0 & 0 \\ 1 & 0 & 1 & 0 \\ 0 & 1 & 0 & 1 \\ 0 & 0 & 1 & 0 \end{pmatrix}. \]
Cette matrice est symétrique réelle, donc diagonalisable avec des valeurs propres réelles. Elle apparaît dans le sujet HEC 1990 et dans de nombreux problèmes d’interpolation trigonométrique.
Forme quadratique et encadrement des valeurs propres
Pour tout vecteur \( X = (x_1, \ldots, x_n)^t \in \mathbb{R}^n \), on pose \( q_n(X) = {}^tX A_n X \). Un calcul direct montre que :
\[ q_n(X) = 2 \displaystyle\sum_{i=1}^{n-1} x_i x_{i+1}. \]
L’inégalité \( 2ab \leq a^2 + b^2 \), conséquence de \( (a-b)^2 \geq 0 \), permet d’encadrer chaque terme :
\[ -(x_i^2 + x_{i+1}^2) \leq 2 x_i x_{i+1} \leq x_i^2 + x_{i+1}^2. \]
En sommant de \( i = 1 \) à \( n-1 \), on obtient \( -2 , {}^tXX \leq q_n(X) \leq 2 , {}^tXX \), et on montre que l’égalité \( |q_n(X)| = 2 , {}^tXX \) implique \( X = 0 \).
Si \( \lambda \) est une valeur propre de \( A_n \) et \( X \) un vecteur propre associé, alors \( q_n(X) = \lambda , {}^tXX \). L’encadrement précédent donne alors :
\[ -2 < \lambda < 2. \]
Toutes les valeurs propres de \( A_n \) sont donc strictement comprises entre \( -2 \) et \( 2 \). Ce résultat est fondamental pour la suite.
Diagonalisation par les suites récurrentes
La diagonalisation de \( A_n \) repose sur une idée élégante : relier les vecteurs propres à des suites récurrentes linéaires d’ordre 2.
Si \( X = (x_1, \ldots, x_n)^t \) est un vecteur propre de \( A_n \) pour la valeur propre \( \lambda \), l’équation \( A_n X = \lambda X \) donne, pour chaque ligne \( k \) (avec la convention \( x_0 = x_{n+1} = 0 \)) :
\[ x_{k-1} + x_{k+1} = \lambda x_k. \]
En posant \( u_k = x_k \) pour \( k \in [![1, n]!] \) et \( u_0 = u_{n+1} = 0 \), on obtient la récurrence :
\[ u_{k+2} = \lambda u_{k+1} – u_k. \]
C’est une suite récurrente linéaire d’ordre 2 à coefficients constants. L’équation caractéristique est \( r^2 – \lambda r + 1 = 0 \), de discriminant \( \Delta = \lambda^2 – 4 \). Puisque \( -2 < \lambda < 2 \), le discriminant est strictement négatif.
On pose alors \( \lambda = 2\cos(\theta) \) avec \( \theta \in ]0, \pi[ \). On vérifie par récurrence que la suite définie par \( u_k = \alpha \cos(k\theta) + \beta \sin(k\theta) \) satisfait la relation \( u_{k+2} = 2\cos(\theta) u_{k+1} – u_k \), grâce à la formule de linéarisation \( 2\cos(\theta)\sin(k\theta) = \sin((k+1)\theta) + \sin((k-1)\theta) \).
La solution générale de la récurrence est donc :
\[ u_k = \alpha \cos(k\theta) + \beta \sin(k\theta). \]
La condition \( u_0 = 0 \) donne \( \alpha = 0 \), donc \( u_k = \beta \sin(k\theta) \). La condition \( u_{n+1} = 0 \) impose \( \beta \sin((n+1)\theta) = 0 \). Puisqu’on cherche un vecteur propre non nul (\( \beta \neq 0 \)), il faut \( \sin((n+1)\theta) = 0 \), soit \( \displaystyle \theta = \frac{p\pi}{n+1} \) pour \( p \in [![1, n]!] \).
Cette partie serait très fortement guidée dans un sujet. Sur HEC 1990, on te pose directement \( \lambda = 2\cos(\theta) \) avec \( \theta \in ]0, \pi[ \).
Spectre et vecteurs propres
On obtient ainsi les \( n \) valeurs propres de \( A_n \) :
\[ \lambda_p = 2\cos\left(\frac{p\pi}{n+1}\right), \quad p \in [![1, n]!]. \]
Ces valeurs propres sont toutes distinctes, car la fonction cosinus est strictement décroissante sur \( ]0, \pi[ \) et les angles \( \displaystyle \frac{p\pi}{n+1} \) sont distincts.
Les vecteurs propres associés ont pour coordonnées :
\[ x_k = \sin\left(\frac{kp\pi}{n+1}\right), \quad k \in [![1, n]!]. \]
Orthogonalité des vecteurs propres
La matrice \( A_n \) étant symétrique réelle, ses sous-espaces propres sont orthogonaux deux à deux. Concrètement, pour deux indices distincts \( p \neq q \), on a :
\[ \displaystyle\sum_{k=1}^{n} \sin\left(\frac{kp\pi}{n+1}\right) \sin\left(\frac{kq\pi}{n+1}\right) = 0. \]
Cette identité trigonométrique, qui n’est pas évidente a priori, découle directement de la symétrie de \( A_n \). C’est un exemple frappant de la puissance de l’algèbre linéaire pour démontrer des résultats d’analyse.
On peut également calculer la norme de chaque vecteur propre. En utilisant la formule de linéarisation \( 2\sin^2(a) = 1 – \cos(2a) \) et la somme géométrique des cosinus, on montre que \( \displaystyle {}^tX_p X_p = \frac{n+1}{2} \).
Matrice des vecteurs propres
En regroupant les vecteurs propres en colonnes, on forme la matrice \( M_n \in M_n(\mathbb{R}) \) dont le coefficient à la ligne \( k \) et à la colonne \( l \) vaut \( \displaystyle \sin\left(\frac{kl\pi}{n+1}\right) \).
Les résultats d’orthogonalité et de norme se traduisent par :
\[ {}^tM_n M_n = \frac{n+1}{2} I_n. \]
La matrice \( M_n \) est donc inversible, et son inverse vaut \( \displaystyle M_n^{-1} = \frac{2}{n+1} {}^tM_n \). Puisque \( M_n \) est symétrique, on a en fait \( \displaystyle M_n^2 = \frac{n+1}{2} I_n \). Ce résultat est remarquable : à un facteur multiplicatif près, \( M_n \) est son propre inverse.
Cas général : matrice tridiagonale symétrique \( (a, b, b) \)
Les techniques précédentes s’adaptent à toute matrice tridiagonale symétrique à coefficients constants, c’est-à-dire avec \( a \) sur la diagonale et \( b \) sur les deux diagonales adjacentes. L’équation aux vecteurs propres conduit à la récurrence \( bu_{k+2} = (\lambda – a)u_{k+1} – bu_k \). Le changement de variable \( \lambda – a = 2b\cos(\theta) \) ramène cette récurrence au cas standard et les valeurs propres sont :
\[ \lambda_p = a + 2b\cos\left(\frac{p\pi}{n+1}\right), \quad p \in [![1, n]!]. \]
Les vecteurs propres restent les mêmes fonctions sinus que pour \( A_n \).
Travailler les matrices tridiagonales
Si tu veux travailler les matrices tridiagonales, voilà des sujets de concours où tu peux les retrouver :
- MATHS 1 HEC APPRO 1990
- MATHS EMLYON APPRO 1999 (Partie 1)
Conclusion
Les matrices tridiagonales constituent un thème incontournable des concours ECG. Leur diagonalisation repose sur le passage aux suites récurrentes d’ordre 2, qui transforme un problème d’algèbre linéaire en un problème d’analyse.
Pour les concours, le réflexe essentiel est d’écrire l’équation \( x_{k-1} + x_{k+1} = \lambda x_k \) avec les conditions aux bords \( x_0 = x_{n+1} = 0 \), puis de poser \( \lambda = 2\cos(\theta) \) pour obtenir des solutions en sinus. Les valeurs propres \( \displaystyle 2\cos\left(\frac{p\pi}{n+1}\right) \) et les vecteurs propres en sinus sont des résultats classiques à connaître.